Landmark-basierte Positionsbestimmung:
ROS-Node: "camera_localization"
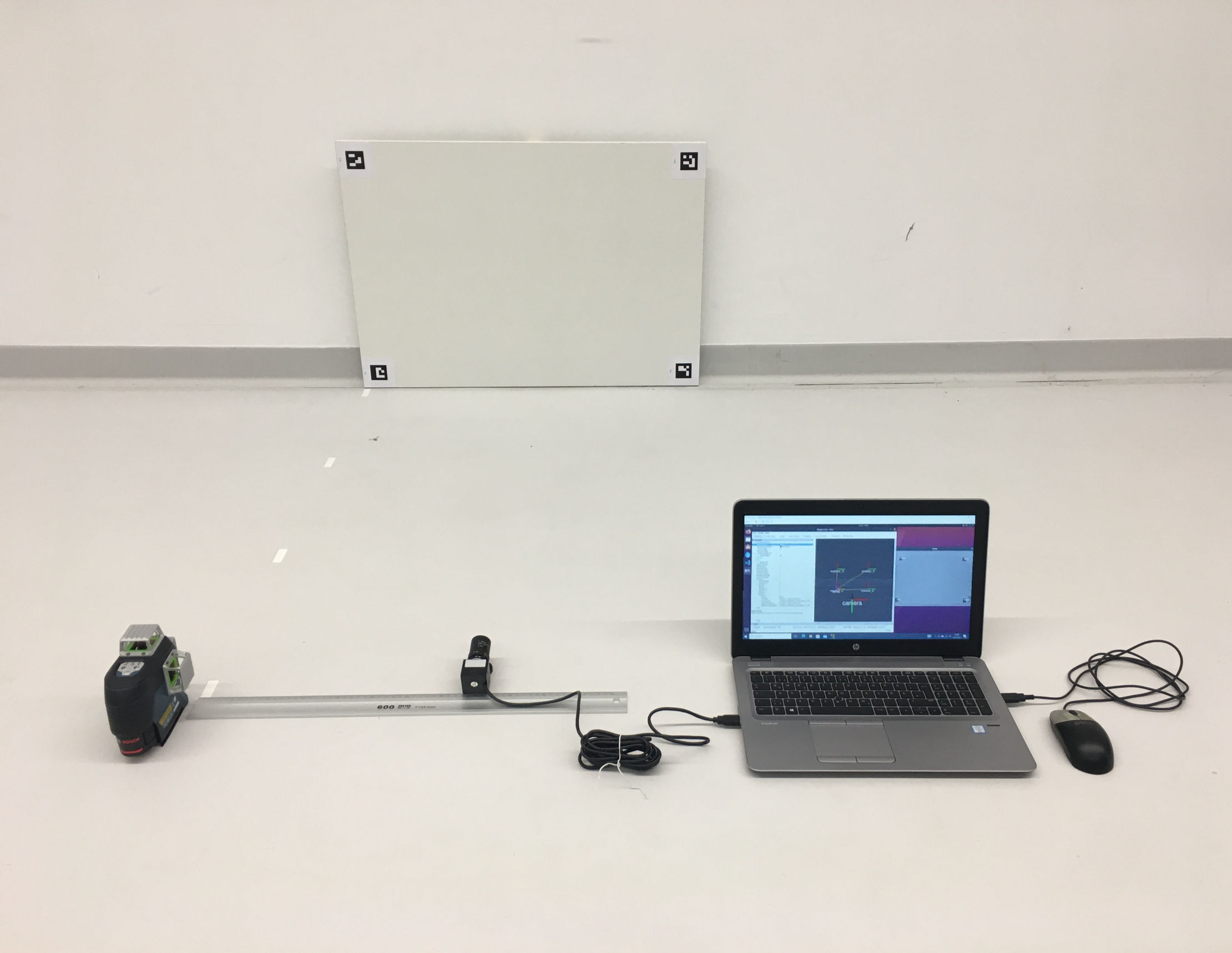
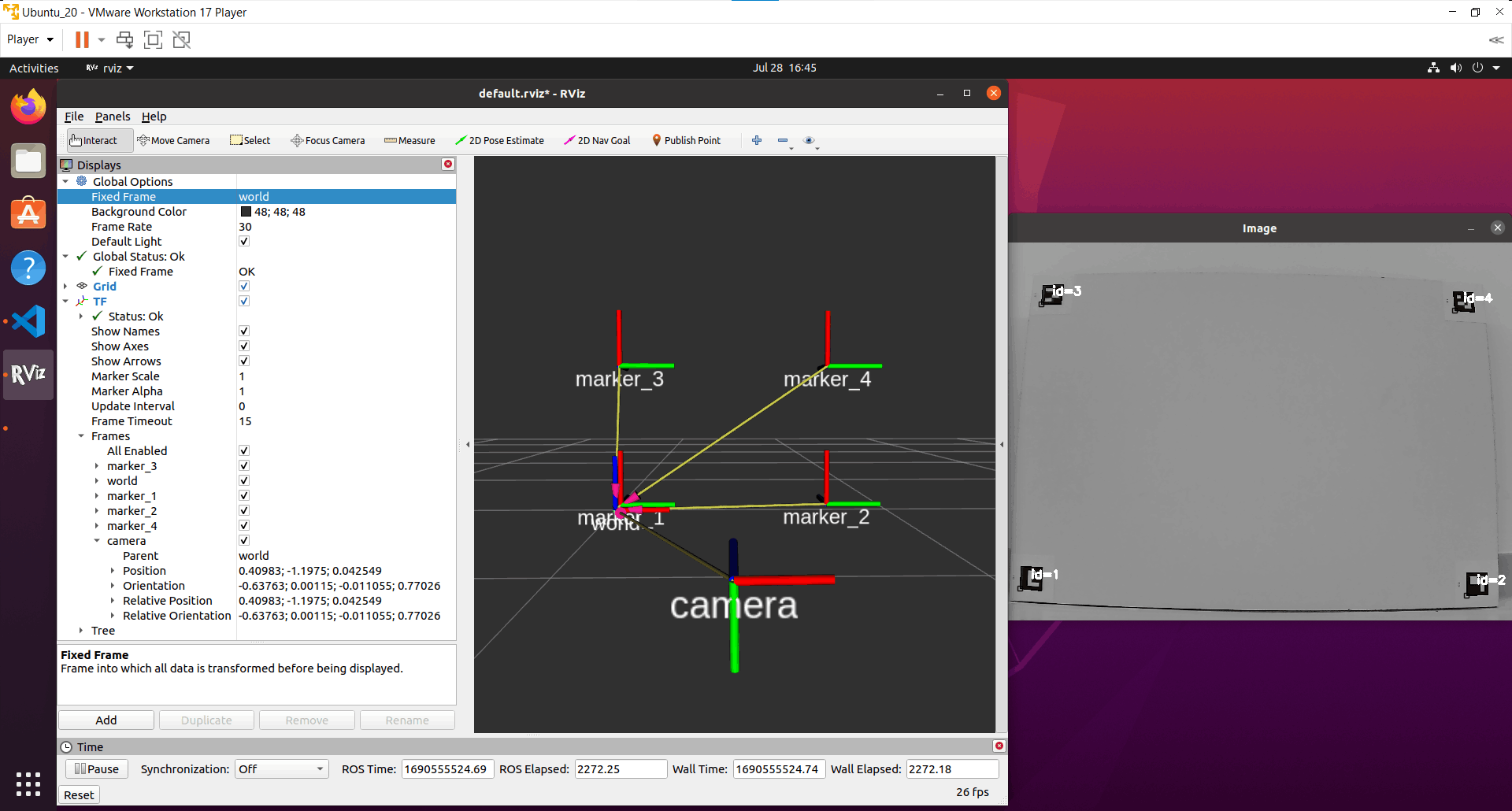
Die in diesem ROS-Node implementierte Positionsbestimmung arbeitet mit Landmarks/Markern (wie QR-Codes, ARUCO-Markern oder Data-Matrix-Codes), welche an bekannten Positionen in der Umgebung angebracht sind.
Auf Basis von mindestens einem erfassten Marker trianguliert der ROS-Node die dreidimensionale Pose (Position, Rotation) einer kalibrierten Kamera des AGVs und published sie über das ROS-Topic "tf".